Motorola DCC
----SIMPLE----SEGURO----ECONOMICO----
| DIGITAL |
|
Motorola DCC |
|
----SIMPLE----SEGURO----ECONOMICO----
|
||
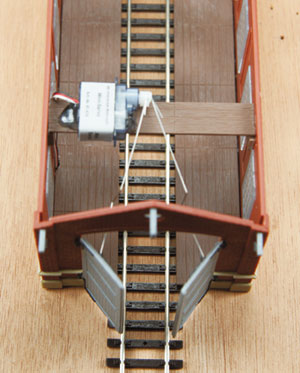
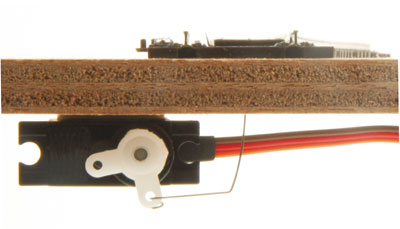
Dispone de cuatro motores servo a elegir, según la función a realizar:
Los motores se suministran con elementos de sujeción, 2 alambres de 0,4 mm y 1 alambre de 0,6 mm. Todos ellos de 100 mm de largo. El 55272 viene en una caja que facilita el montaje bajo tablero y el cambio rápido del servo en caso de avería. Incluye una plantilla para determinar donde deben hacerse los agujeros en el tablero.
|
|||||||||||||||||||||||||||||||||
|
|
|||||
| |
|
Navegación Rápida [digital] |
|
||