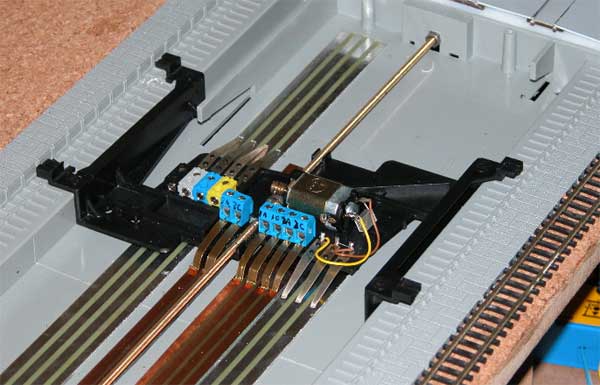
Los tres motores pueden funcionar independientemente o a la vez.
Como podemos apreciar, para su manejo necesitamos no menos de 6 funciones de control, esto es así por que para cada motor empleamos una dirección para hacerlo funcionar en un sentido o en el sentido contrario, por lo que la elección del decoder se presentaba complicada, ya que además de la cantidad de funciones necesarias, el decoder debía permitir el consumo de los motores. La solución llegó tras hablar con el departamento técnico de Trenes Aguiló, quien me aconsejo el empleo del decoder 77 500, lejos de mis tesis de emplear decoders de función, ya que el decoder 77 500 está diseñado para escalas tipo LGB y permite además de emplear 8 funciones independientes grandes cargas de consumo.